Huber loss is like a “patched” squared loss that is more robust against outliers. For small errors, it behaves like squared loss, but for large errors, it behaves like absolute loss:
\[\operatorname{Huber}(x) = \begin{cases}
\frac{1}{2}{x^2} & \text{for } |x| \le \delta, \\
\delta |x| - \frac{1}{2}\delta^2 & \text{otherwise.}
\end{cases}\]
where $\delta$ is an adjustable parameter that controls where the change occurs.
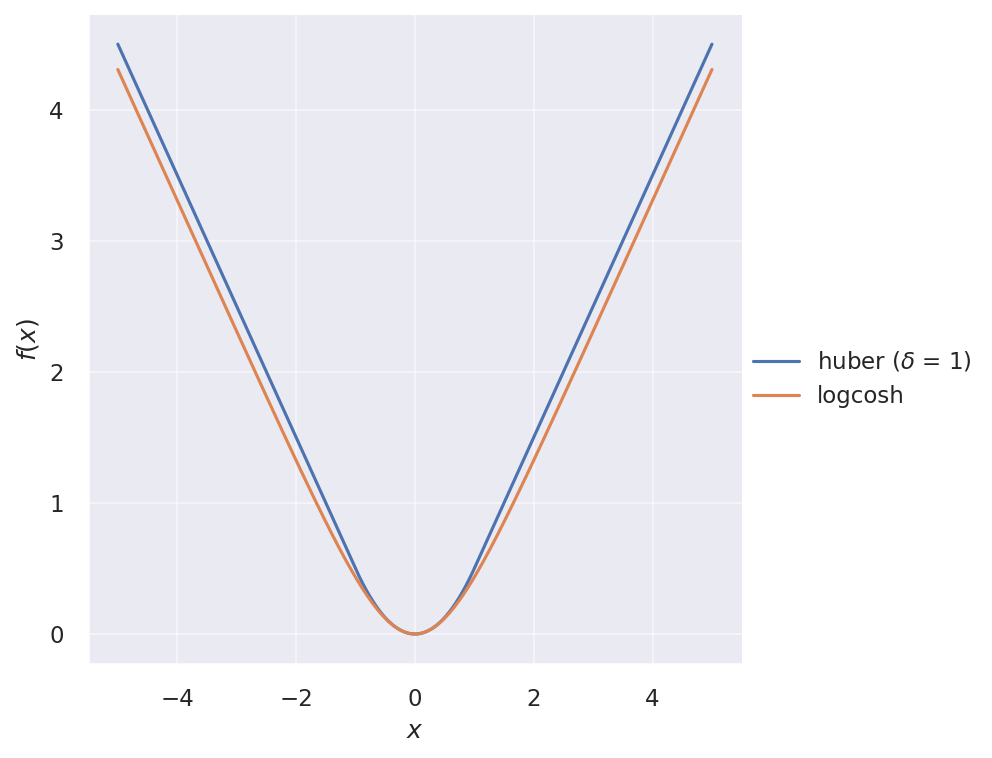
Recently, I encountered the logcosh loss function in Keras: $\operatorname{logcosh}(x) = \log(\cosh(x))$.
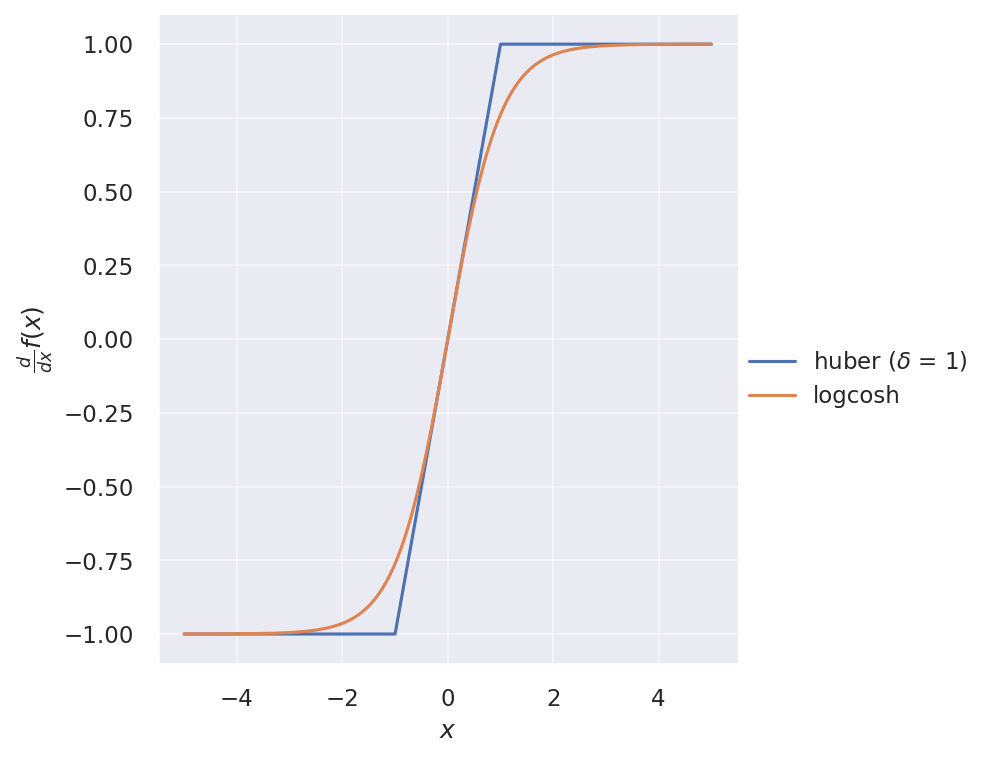
It looks very similar to Huber loss, but twice differentiable everywhere. Its first derivative is simply $\tanh(x)$.
The two loss functions are illustrated below:
And their gradients:
One has to be careful about numerical stability when using logcosh. Instead of the original expression, we can write $\cosh(x)$ in terms of exponentials as $\cosh(x) = \frac{e^x + e^{-x}}{2}$, and define logcosh as follows:
import numpy as np
logcosh = lambda x: np.logaddexp(x, -x) - np.log(2)
Both the loss functions are available in TensorFlow/Keras: 1, 2.
But I did an implementation of Huber loss on my own before it was added to Keras. For posterity’s sake, here is my own implementation:
from tensorflow.python.keras import backend as K
from tensorflow.python.framework import constant_op
from tensorflow.python.ops import array_ops
from tensorflow.python.ops import math_ops
def huber(y_true, y_pred, delta=1.345):
delta = constant_op.constant(delta, dtype=y_pred.dtype)
half = constant_op.constant(0.5, dtype=y_pred.dtype)
abs_error = math_ops.abs(math_ops.subtract(y_pred, y_true))
squared_loss = half * math_ops.squared_difference(y_pred, y_true)
absolute_loss = delta * abs_error - half * math_ops.square(delta)
return K.mean(array_ops.where_v2(abs_error < delta, squared_loss, absolute_loss), axis=-1)
Also, here’s my own implementation of logcosh using $\cosh(x) = \frac{1 + e^{-2x}}{2 e^{-x}}$ for positive $x$ and $\cosh(x) = \frac{e^{2x} + 1}{2 e^x}$ for negative $x$ to ensure numerical stability.
The softplus activation function $\operatorname{softplus}(x) = \log(1 + e^{x})$ is used in the calculation.
from tensorflow.python.keras import backend as K
from tensorflow.python.framework import constant_op
from tensorflow.python.ops import array_ops
from tensorflow.python.ops import nn_ops
def logcosh(y_true, y_pred):
double = constant_op.constant(2.0, dtype=y_pred.dtype)
log_two = constant_op.constant(np.log(2.0), dtype=y_pred.dtype)
zeros = array_ops.zeros_like(y_pred, dtype=y_pred.dtype)
error = math_ops.subtract(y_pred, y_true)
positive_branch = nn_ops.softplus(-double * error) + error - log_two
negative_branch = nn_ops.softplus(double * error) - error - log_two
return K.mean(array_ops.where_v2(error < zeros, negative_branch, positive_branch), axis=-1)
Fun fact, softplus can be generalized as follows according to this Quora answer:
\[f_{t}(x) = \frac{1}{t} \log\left(1 + e^{tx}\right)\]
where $t = 1$ yields the softplus activation function, while $t \to \infty$ yields the ReLU activation function. Note that softplus is differentiable everywhere while ReLU is not differentiable at $x = 0$.
\[\begin{align}
f_{1}(x) &= \operatorname{softplus}(x) = \log(1 + e^{x}) \\
f_{\infty}(x) &= \operatorname{ReLU}(x) = \max(0, x)
\end{align}\]